

画像処理により、カメラから得られる映像の特徴を捉え形状(文字や形)を識別する検査や、位置、向きなどを認識することができます。通常ロボットと対象物までの位置をプログラムする必要ですが、画像認識によって汎用的に自動運用することができるようになります。
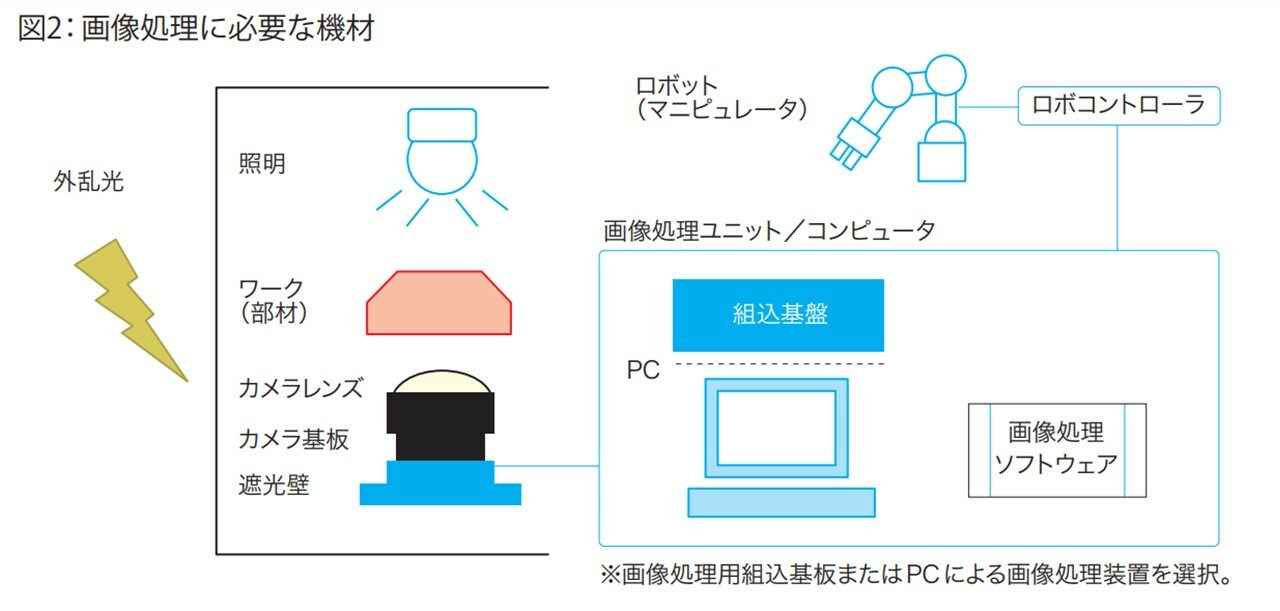
カメラ(カメラレンズ/カメラ基盤)
カメラは主にCMOSカメラとCCDカメラがあります。高速化や高解像度ではCCDが有利であり、価格ではCMOSが有利といわれています。さらに白黒カメラとカラーカメラがあり、色相変化をとらえる場合はカラーカメラを用います。これらのカメラは、使用する環境や機能、性能、コストなどを考慮して、デジタルチップを搭載したセンサ基盤とレンズを選定します。
カメラ自体の機能としては、撮影対象物を画像として2 次元の細かい画素(ピクセル)として出力します。
画像処理ソフト/画像処理装置
カメラから出力された画素を入力し、様々な処理を行うのが画像処理ソフトまたは画像処理装置となります。画像処理では入力した画素から色や輝度を区別し、色や線形、文字、物体などの抽出や認識を行うことができます。これらの機能を用途に合わせて組み合わせ、物体の位置や、ラベルの有無、形状の整合性などを出力します。
照明
カメラや画像処理を用いる場合一番重要な要素が照明です。特に利用する環境に外光が入ったり、対象物が鏡面や凹凸がある場合に光の反射や影の映り込みによってカメラや画像処理が正しく動かない場合があります。そのような場合は、①画像処理を利用する環境の照明を調整する、②画像処理用の照明を用いて画像処理に最適な状態にする、③外乱を遮断する遮光壁を用いるなどの調整を行います。
画素数
画像処理は画素数によって精度と処理速度が変化します。画素数が多ければ処理精度が上がりますが、速度が遅くなる傾向があります。また高解像度、高速化を図るほど高価になるのでコストに合わせて機材を選定します。
ゆがみ補正
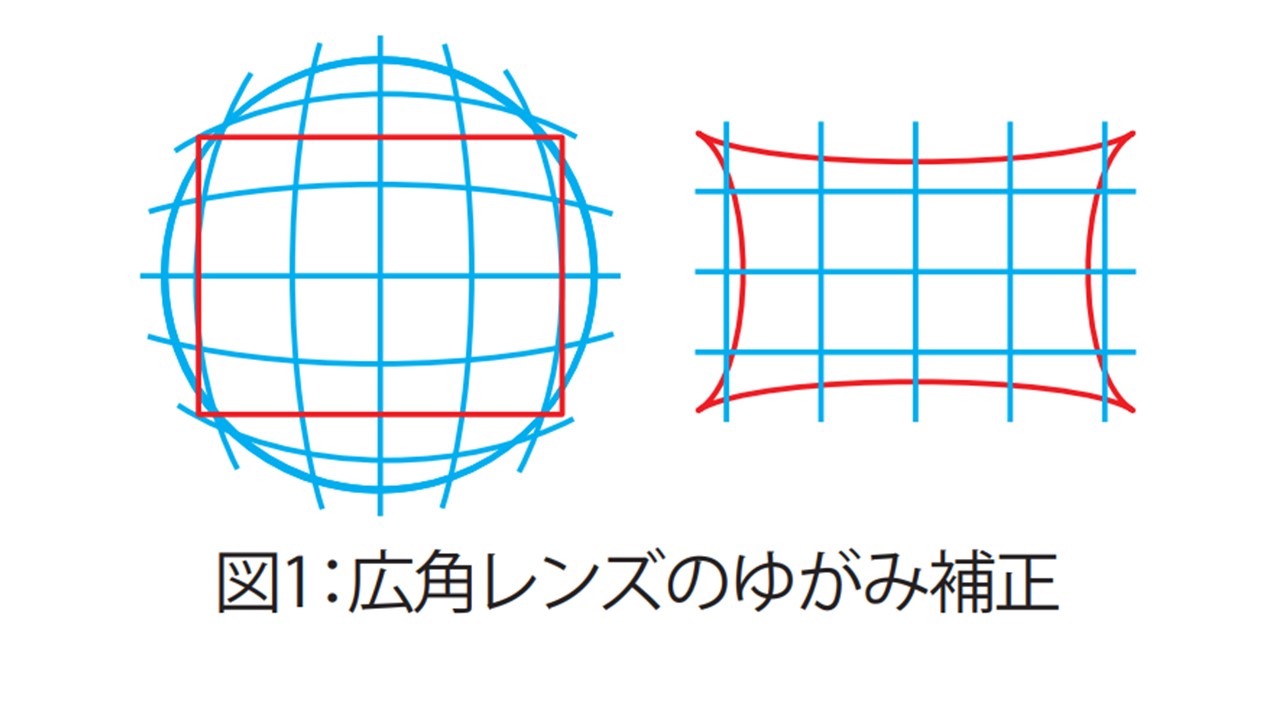
カメラは設置位置によって撮影範囲が変わる対象物との距離が近いと撮影範囲は狭く、遠い距離は撮影範囲を広くすることができます。しかしながら遠い距離は画素数が粗くなるため精度が悪くなる場合があります。
そこで、広角レンズを用いると距離を変えずに撮影(センシング)範囲を広げることができます。しかしながら広角レンズを用いると画像が歪曲して見えてしまいます。これを補正する技術がゆがみ補正です。
ゆがみ補正により、ゆがんだ画像を正しい形状にすることができますが、あまり広い角度を補正すると補正率が下がり逆に精度が落ちる可能性があります。撮影対象物との距離、使用するカメラ、画像処理、精度、速度の関係性を考えて適正に選定、構築することが必要です。
光について
画像処理は所定の光源により精度や速度が向上します。特に下記の環境に留意する必要があります。
● 窓が無く一定の照明。
● 窓がある場合は窓から離れた場所で使用するか、遮蔽壁を設置。
● 蛍光灯などの波長に影響する場合がある。
● 波長域が被る場合、環境外の波長域、例えば赤外線波長を使用して干渉しないようにする
画像ブレ
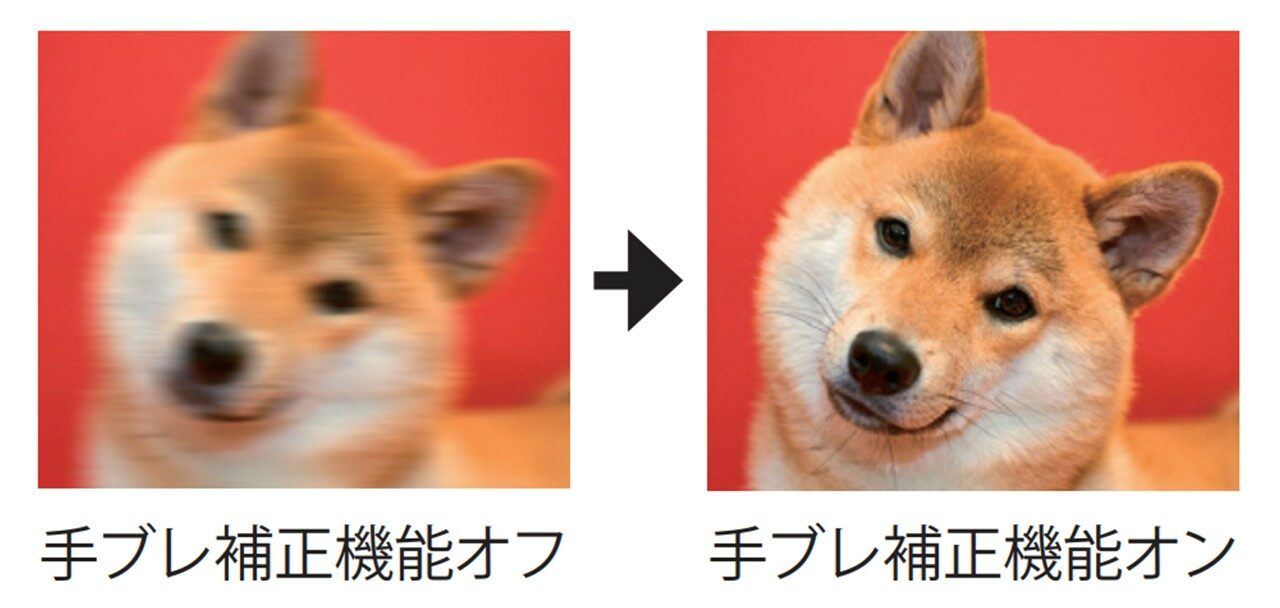
対象ワーク(部材)がベルトコンベアなどで高速に動く場合、カメラと画像処理の能力が低いと、画像ブレが発生し正しく画像処理が動作しない場合があります。そこで、対象ワークの許容速度や運用速度から最適な画像処理速度を計算して画像ブレを防ぐ様に設計、製造します。もしくは予めベルトコンベアの移動速度と同期させてカメラを動かすことで画像ブレを軽減させる手法もあります。
画像処理はカメラから得られる映像の特徴を捉え形状(文字や形)から識別したり、検査や位置、向きなどを認識することができます。また、レンズのゆがみや色の変化を補正したりディスプレイ表示や3次元的に距離などの計測を行うこともできます。
バーコード・QRコード読取

バーコードとは帯状の白黒の模様パターンでデータをコード化したものです。光学センサを用いたバーコードリーダを用いて非接触で読み取ることで商品情報を認識することができます。さらに情報量の多いQRコードがあります。
ラベル検査
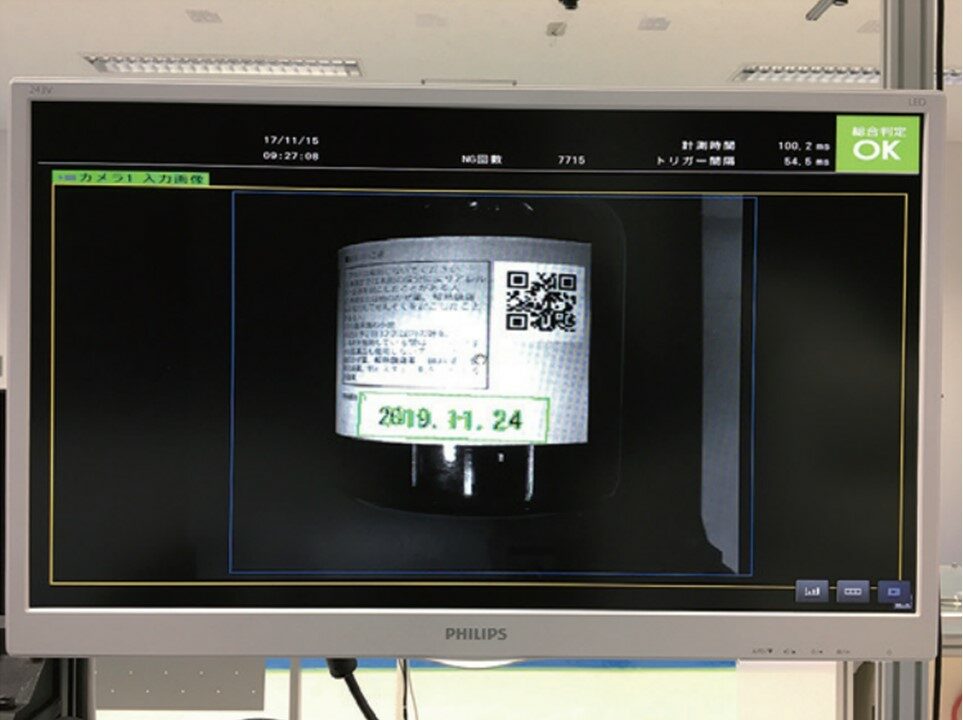
ワーク(商材)のラベルの日付や印字、ラベルずれなどを画像処理で自動検査します。ボトルなど丸いワークは回転させたり、複数の方向にカメラを設置するなどの工夫が必要です。
ピッキング
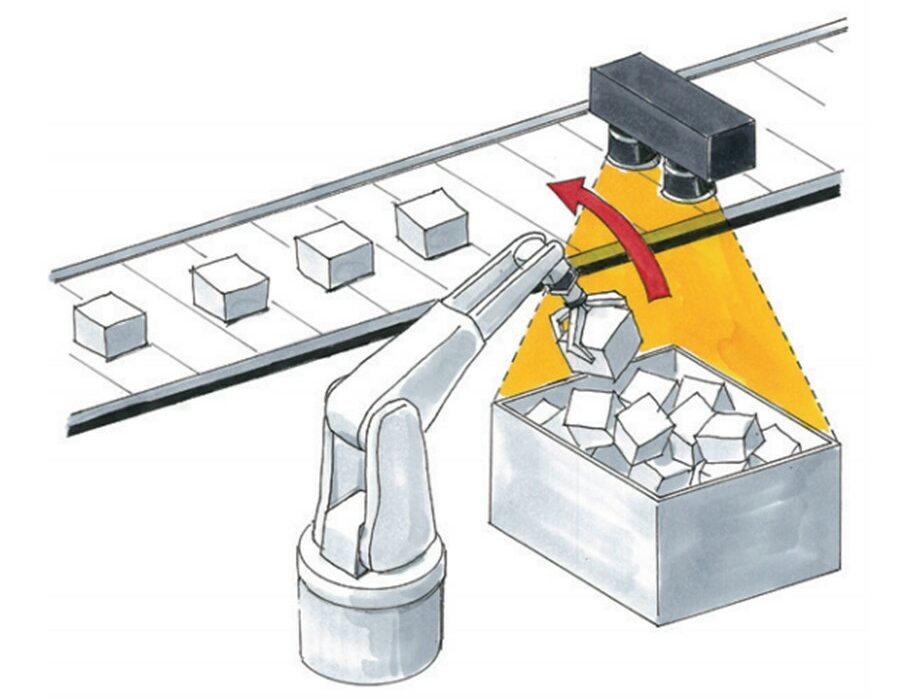
マニピュレータロボットがワークを掴む動作(ピッキング)を行うために、ワークの形状や位置・向きを正確に認識する画像処理が有効です。一般的にはワークが流れてくるベルトコンベアに画像処理装置用カメラを設置するか、マニピュレータの先端にカメラを設置します。特にワークとベルトコンベアなどの台座が区別できる様な色分けを行うことが重要である。
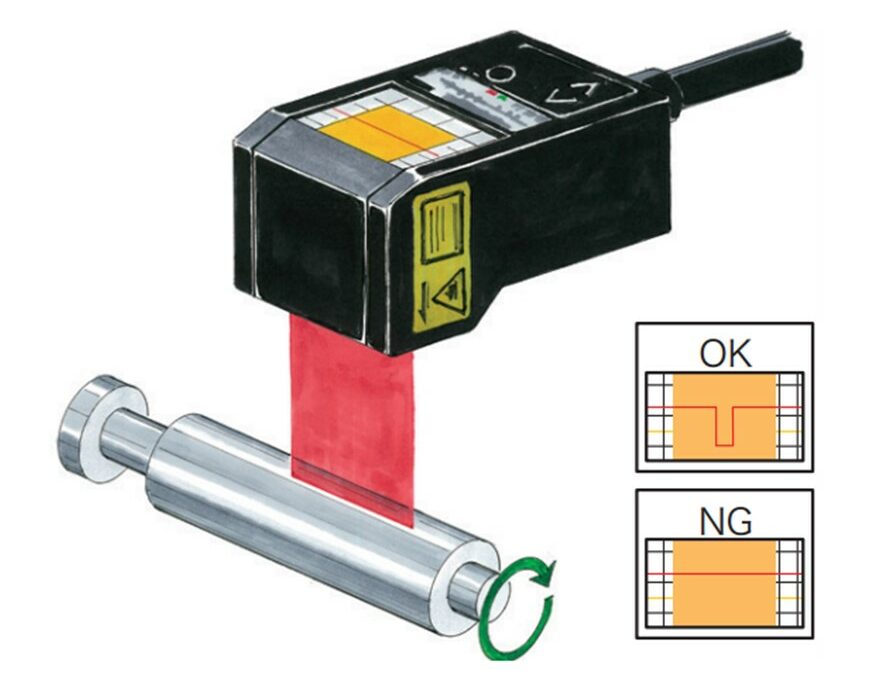
外観検査
ワークの欠損や黒点、曲がりなどの形状検査を画像処理で行います。ワークの寸法が大きい場合や、ワークとカメラの距離が遠い場合にはカメラの解像度が粗く精度が落ちる場合があります。その場合はカメラの解像度を高解像度にするか、複数のカメラを設置して分散させて画像処理を行う事も可能ですが、コストや高速な画像処理専用装置が必要となります。
侵入検知
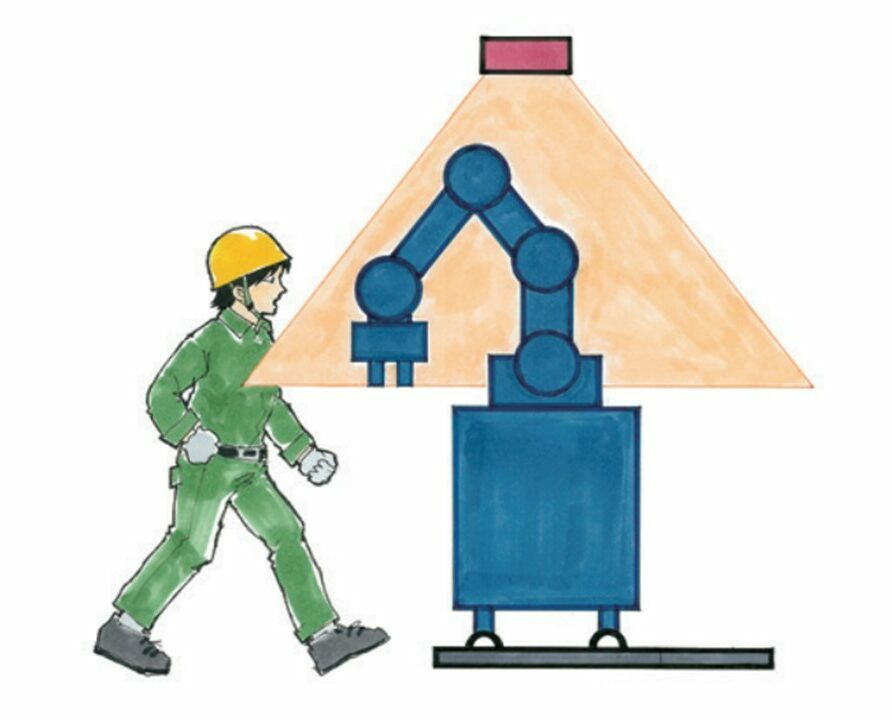
ロボットは通常安全柵などを設けて作業者の安全を確保するなどの安全基準があります。しかしながら最近ではロボットとの作業を協調・協同に行う作業の要望が増えてきており、低速や低トルクのロボットの場合は安全柵なしで運用を可能にするなどの安全基準の緩和が進んでいます。この場合の安全確保の一方策として、作業者がロボットに近づいた場合にロボット動作を低速にしたり、停止させ、離れた場合は動作を再開させるなどといった制御を画像処理を用いた侵入検知で実現することがあります。
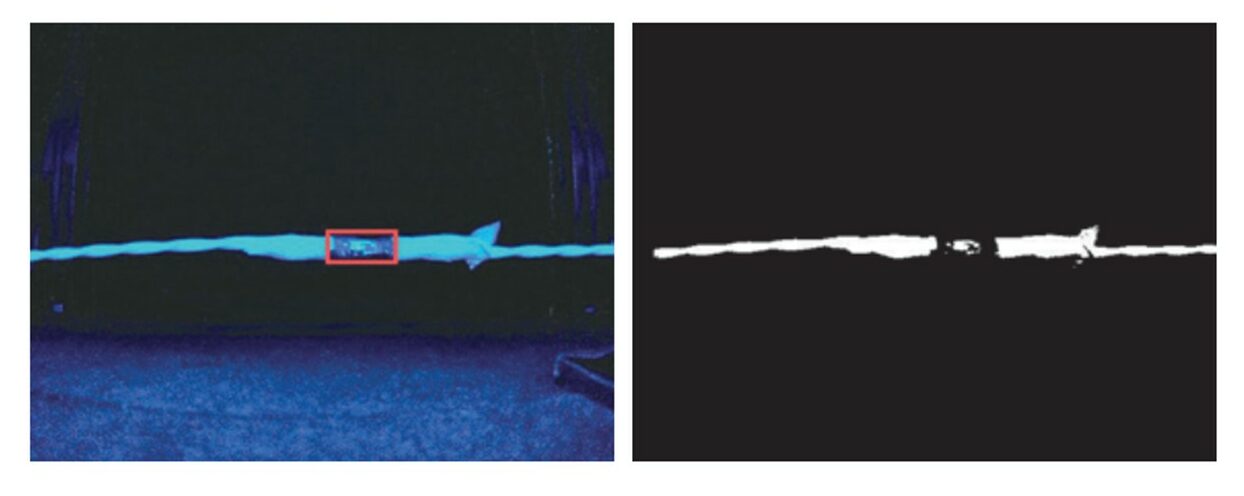
ライン検査
画像処理による検査は、鏡面などのワークであると照明が反射してしまうため不得意ですが、ラインセンシングにより凹凸などの検査や刻印などの検出が可能です。
3次元認識(ステレオビジョン)
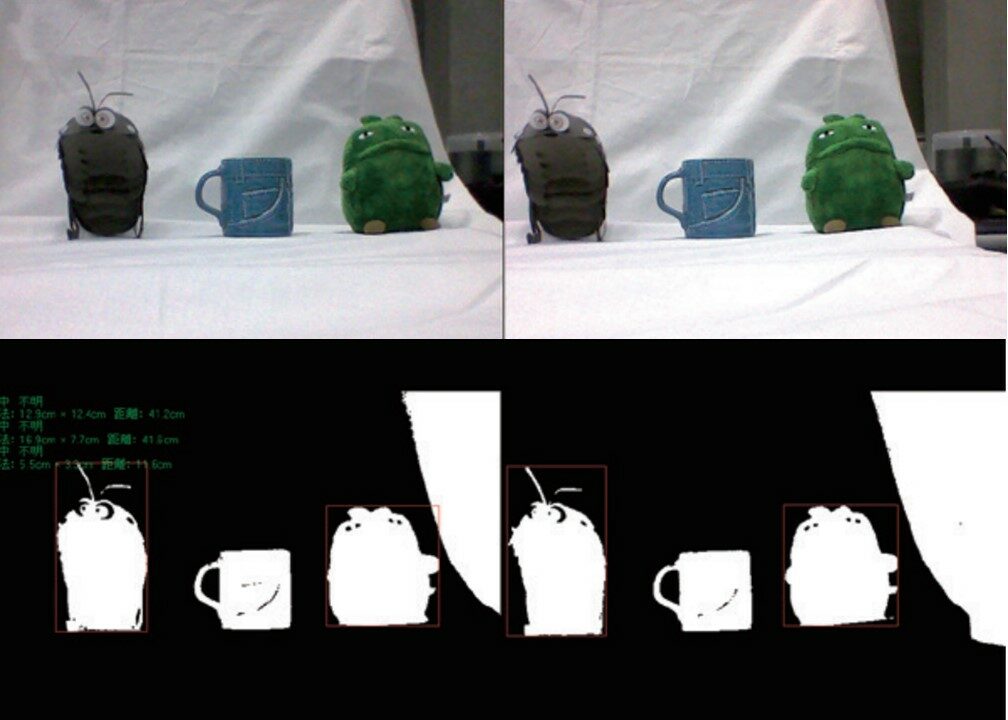
2つのカメラを用いてワークの寸法やワークまでの距離を計測する事ができる。これを利用し、ロボットがワークに対し様々な方向や距離から最適なピッキングを行うことが可能となります。最近では双腕ロボットのビジョンセンサに用いられています。
