
「コンベアトラッキング」とはコンベアの移動距離、速度を知るためのセンサを取り付け、コンベアの速度と同じ速度でロボットを動作させ、コンベア上の製品を取得するなどの動作をさせることです。
コンベアトラッキングにはガイドで製品の動く横方向を制限する場合(コンベアトラッキング、又はセンサトラッキング)と製品の位置を制限せず、上からビジョンカメラで見て位置を把握する場合(ビジョントラッキング)があります。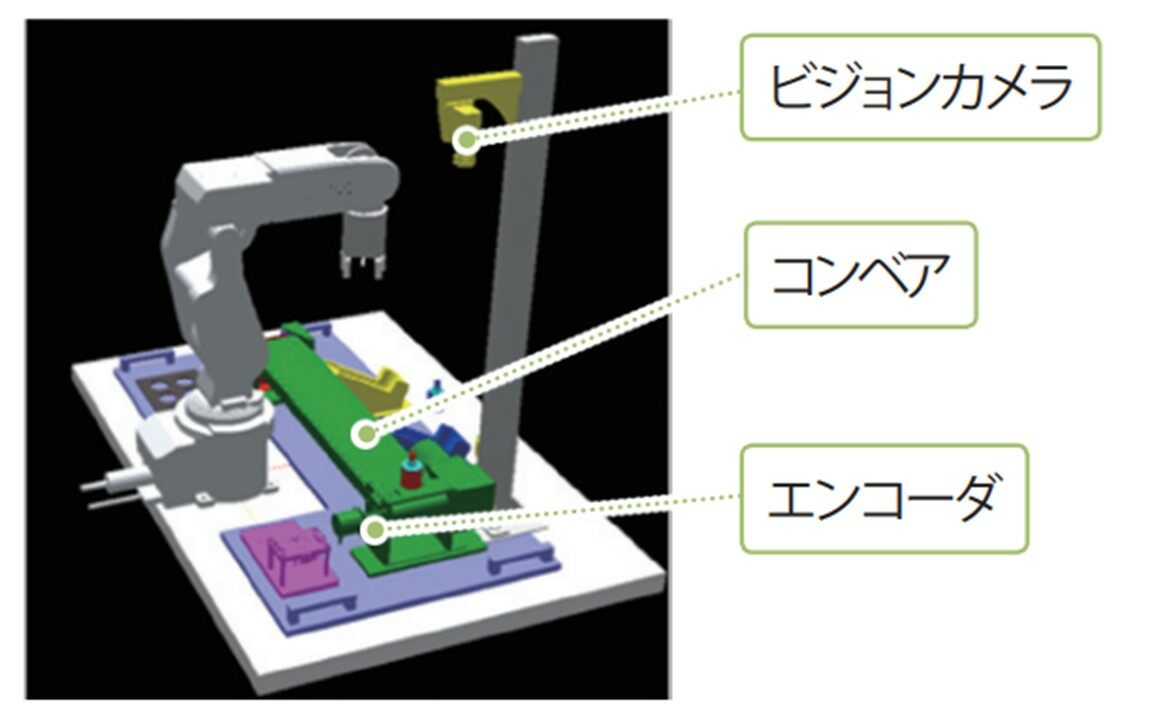
![]()
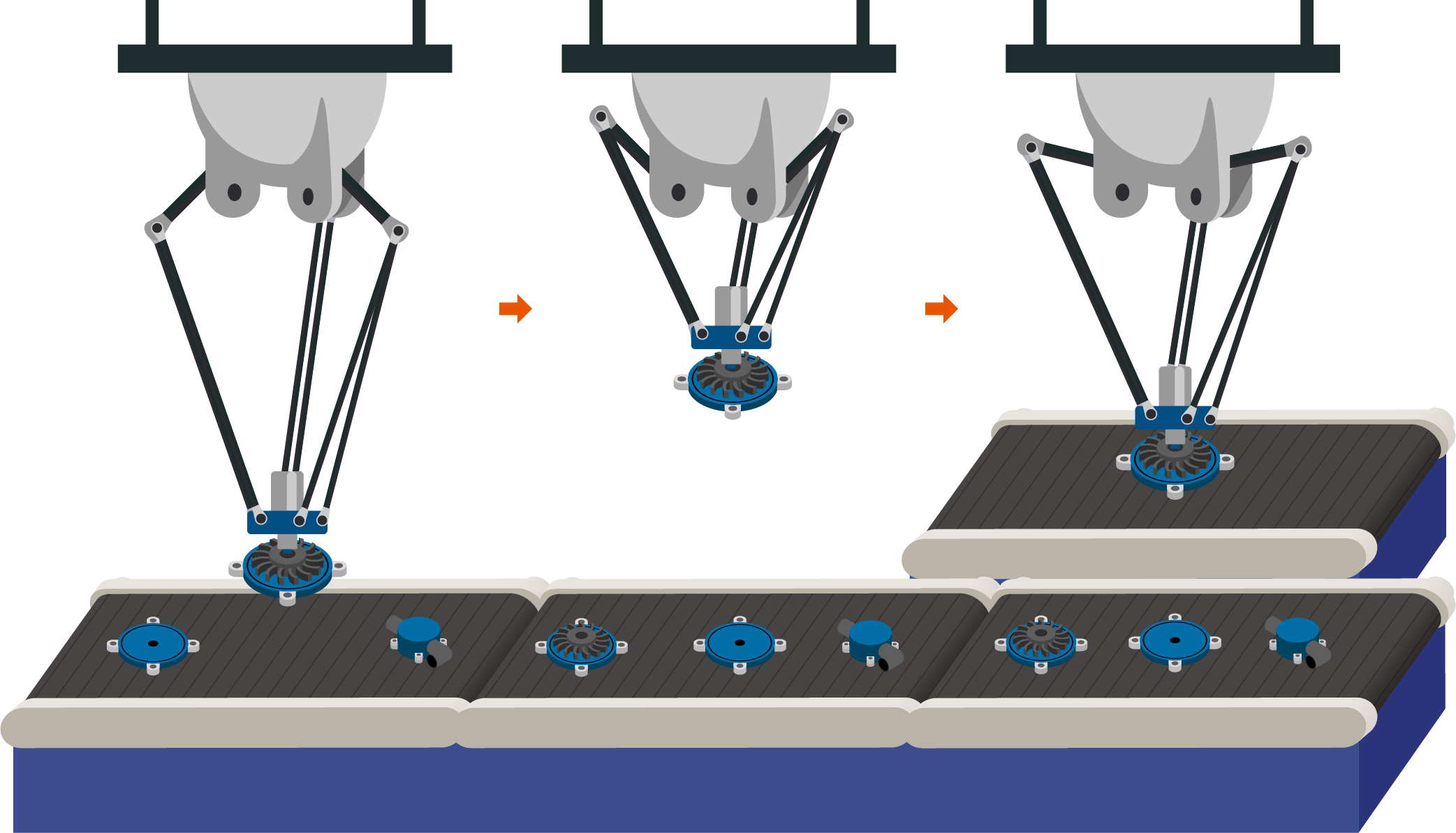
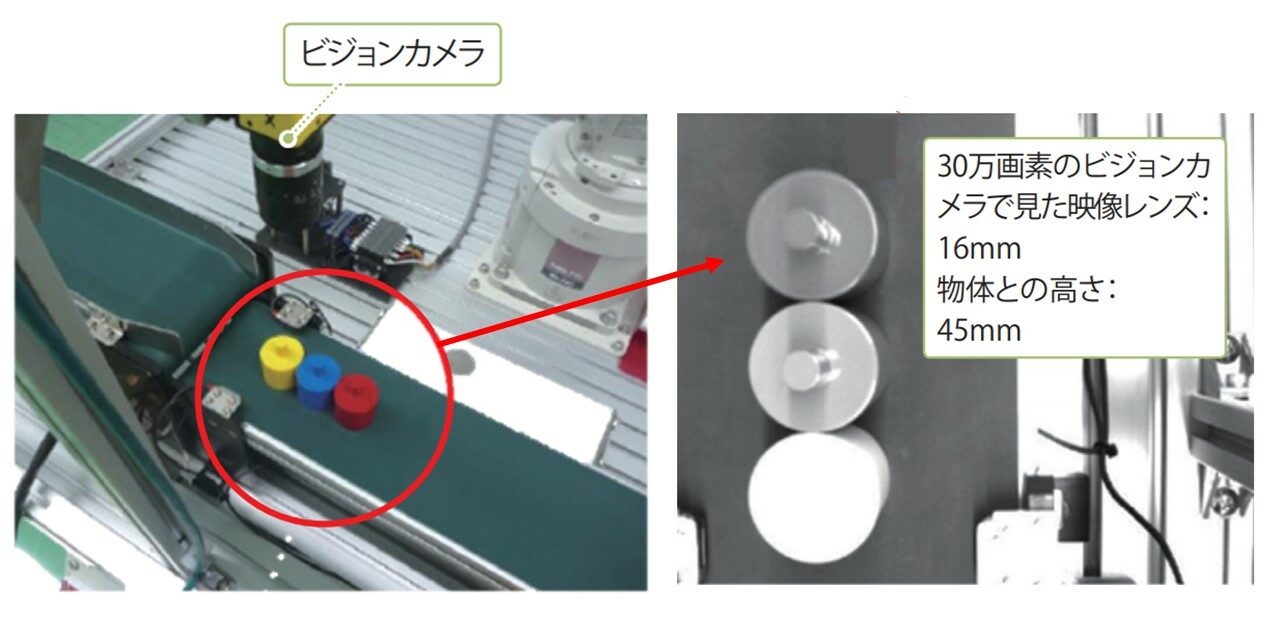
「ビジョントラッキング」とはコンベアトラッキングに画像を認識するカメラを使用し、特定の製品の位置や向きを認識させ、その情報とエンコーダの情報からロボットが追従し製品を取得する技術です。ビジョンセンサには取得するワークの形状と取得する位置を予め記憶させます。

ビジョントラッキングの際にワークを認識し、どのようにロボットが把持するかを決める必要があります。把持する方法には主に、平行ハンドなどで「掴む」場合と真空を使用し「吸着する」場合があります。
キャリブレーション(Calibration)は、日本語に訳すと「較正(校正)」になります。
ロボットシステムにコンベアを取付け、トラッキング(追従動作)機能を実現するには、コンベア上のワーク位置がロボットにとってどの位置にあるかを計算する必要があります。
コンベアが動作すると、コンベアに取付られたエンコーダからパルス信号が出力され、その信号をロボットが受け取り、自分の座標系に補正を行い、その位置に移動します。
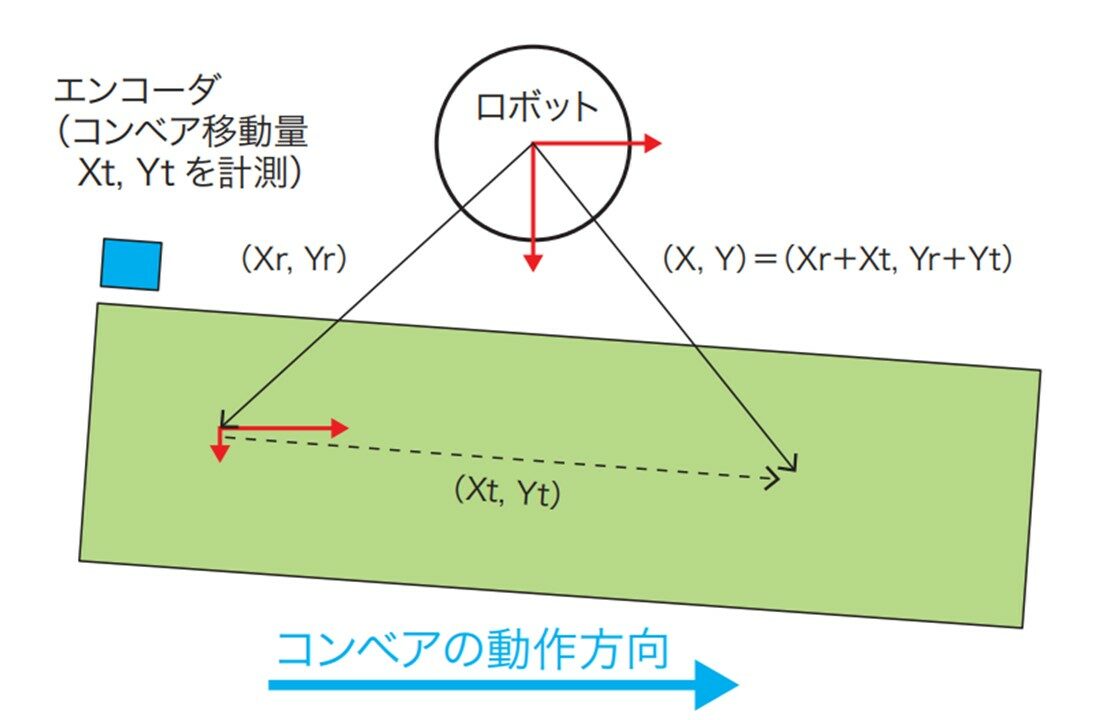
上の図では、製品の現在位置が(Xr,Yr)でコンベアが動作した際のエンコーダからの信号による補正データが(Xt,Yt)とするとロボットが動作すべき位置は(X,Y)=(Xr+Xt,Yr+Yt)となります。
この計算をするためにはエンコーダからの信号とコンベアの移動距離の関係を設定する必要があります。この設定を行う事を「キャリブレーション」といいます。
また、ビジョンカメラを使用する場合、ビジョンで撮像した画像の位置とロボットの座標を合わせる必要があり、これも「キャリブレーション」といいます。
コンベアトラッキングに必要な機器には以下のようなものがあります。
コンベアトラッキングを利用すると下記のようなメリットがあります。
コンベアトラッキングは長い期間使用していると次第に位置がずれていくことがあります。
MIRAI-LABでは構想設計のWeb相談を受け付けております。自動化でお悩みの方は、初回無料ですので、是非お問合せ下さい。
