
今回の記事では産業用ロボットの教示作業を行うティーチングペンダントについて解説したいと思います。
ティーチングペンダントは、産業用ロボットのメーカーや産業用ロボットの機種によってさまざまなものが使用されています。
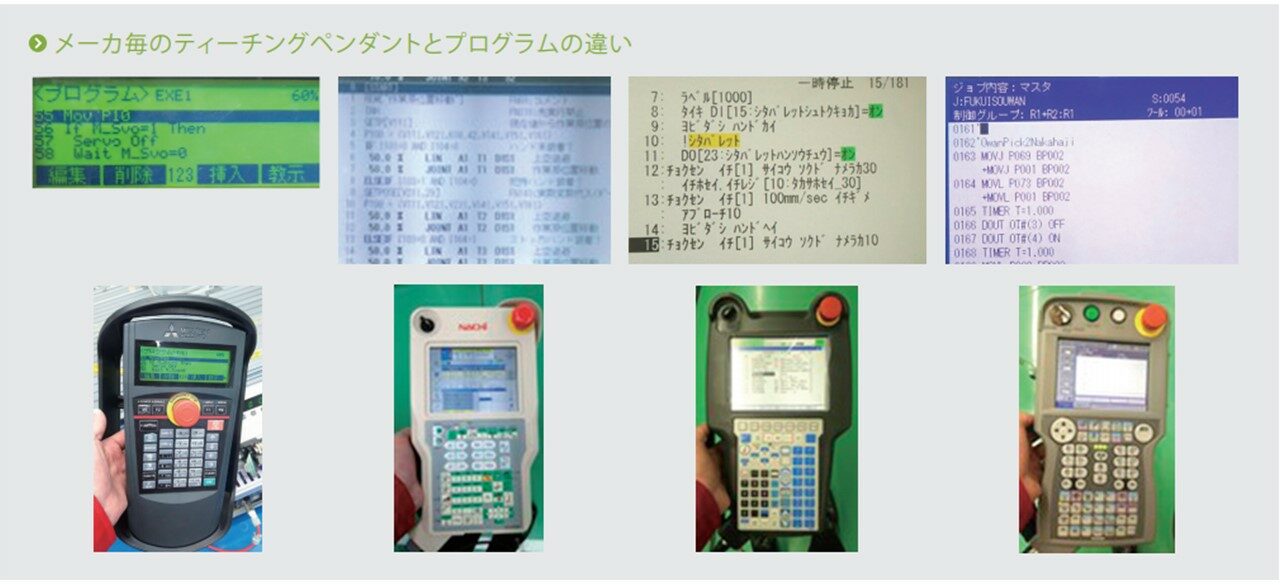
ティーチングペンダントは、教示作業中は作業者が手にもって作業を行うため、扱いやすいものでなくてはなりません。そのために、軽量化や操作性など、人間工学を意識したものが作られています。
ただ、ティーチングペンダントの操作方法や、使用されている用語は統一されていないため、一般的なティーチングペンダントについて説明します。

 教示作業時にはティーチングペンダントを持ってマニュピュレータに接近して作業を行います。
教示作業時にはティーチングペンダントを持ってマニュピュレータに接近して作業を行います。
もし、マニピュレータが不意の動作等を起こした場合には非常停止が必要であるため、必ずティーチングペンダントには赤色の非常停止ボタンがついています。
 産業用ロボットのすべての情報表す表示盤です。
産業用ロボットのすべての情報表す表示盤です。
 このスイッチはイネーブルスイッチです。
このスイッチはイネーブルスイッチです。
ティーチングペンダントの裏面にあるスイッチです。スイッチを押してイネーブル状態にしないと、ロボットの軸操作ができません。このスイッチをさらに強く押すか完全に離すと、モーター電源が遮断されて、ロボットは停止します。
6軸多関節型ロボット用はX,Y,Z,A,B,C(この表示はメーカーによって異なる)6種類の押しボタンがそれぞれ “+”と“-”の計12個あり、これらが動作軸キーです。
前項のイネーブルスイッチを押しながら、この動作軸キーを押すとマニピュレータを動かすことができ、“+”と“-”では動きの方向が反対となります。
6軸であっても慣れると簡単な扱いで操作できるが、ティーチングペンダントを見ないで行うブラインドタッチで教示を行ってはいけません。ちょっとしたボタンの操作が大きな事故の原因になります。
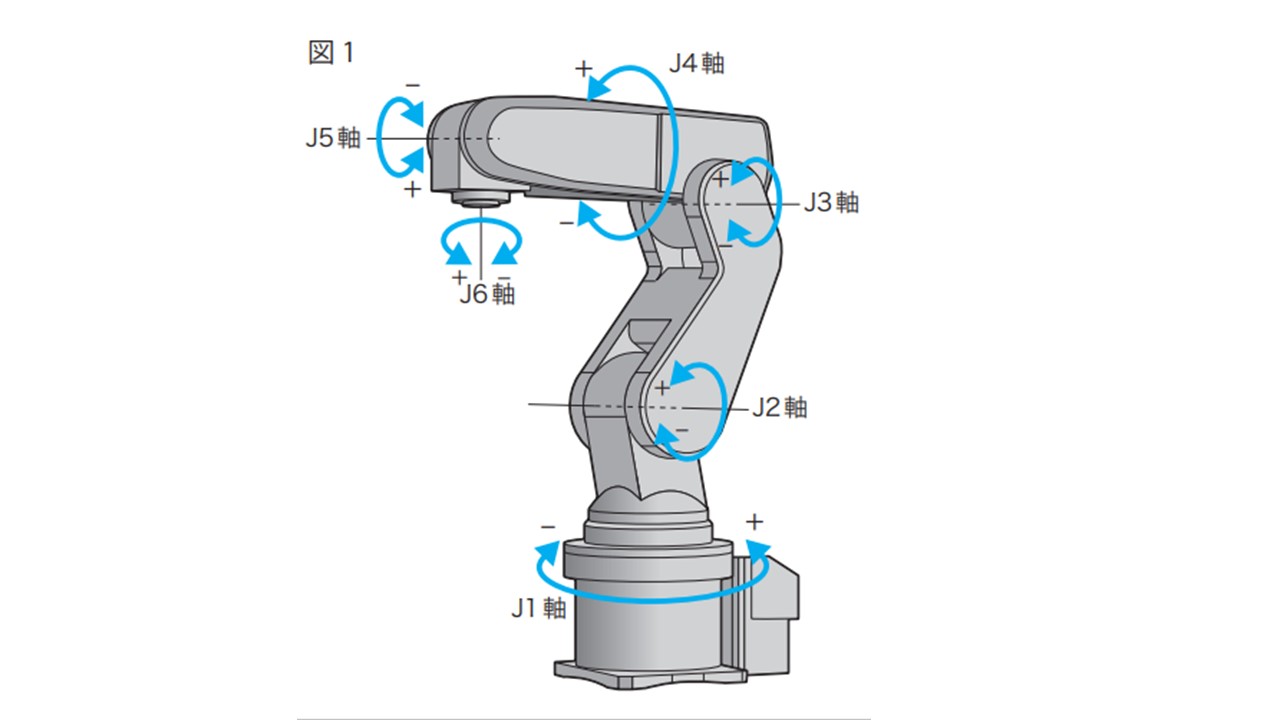
ロボットの各関節の回転角度を値とする座標系のことを言います。
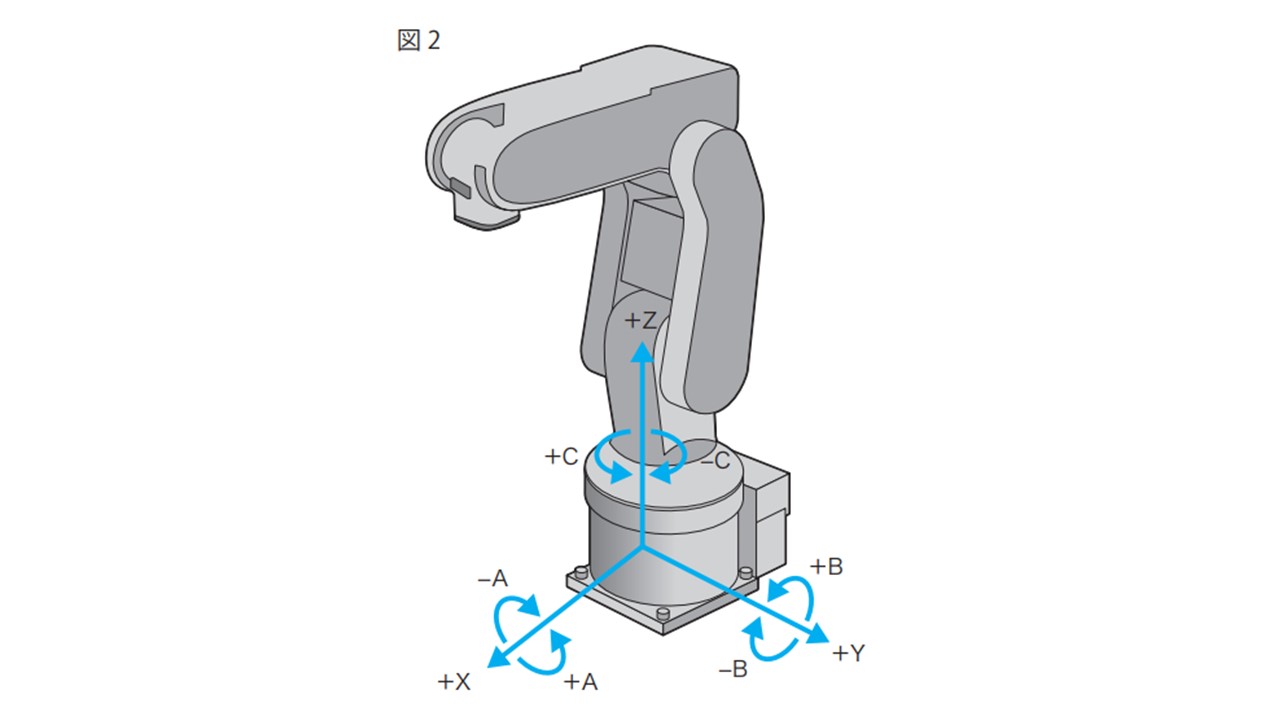
互いに直交している座標軸を指定することによって定まる座標系のことを言います。
数字キーが電卓と同じような配列で配置されています。これらの数字キーは教示プログラムの番号や各種作業条件の設定などに用います。
メーカーによって表示・表現は異なるため、次のようなボタンがついています。

産業用ロボットの特徴の一つに、自動運転時の動作速度が速くサイクルタイムを短くできる挙げられます。
教示作業時の速度は一定速度以下に抑えることがISOなどで決めれています。この速度は250mm/sec(1,500㎝/min)以下です。
1.作業規定の作成(第150条の3)
産業用ロボットの種類、構造、作業方法に見合った作業規定を作成し、これを遵守するように自主管理を行う。2.直ちに運転を停止できる措置を講じる(第150条の3)
教示中に危険を察知したならば、直ちに可動領域内にいる教示者か、外部にいる監視者などにより、産業用ロボットを緊急に停止できるようにする。3.作業中である旨の教示(第150条の3)
教示作業中である事を明示し、教示者以外には産業用ロボットの操作を行わせないようにする。4.特別教育の実施(第36号 31号)
教示者には、産業用ロボットの基本的な構造、危険の源泉、回避方法などを教育することにより、災害防止のために必要な知識、技能を習得させる。5.作業開始前の点検等(第151条)
作業を開始する前には決められた点検を実施する。点検に漏れが無いよう、あらかじめチェックを作成しておく。

①お客様の希望するお日にちで受講することが出来る。
②実際の現場同様の設備が備わっているので、実務に役立てられる。
③ハンドリングロボットコースや、スポット溶接ロボットコースなど、お客様に合わせてカリキュラムを組むことが出来る。
④同じ企業の皆様だけの少人数や、個別での受講ができる。
ご質問や、ご不明点がございましたら、お気軽にお問合せください。
