

産業用ロボットでの「トラッキング」とは、“追従する”という意味で使用されます。
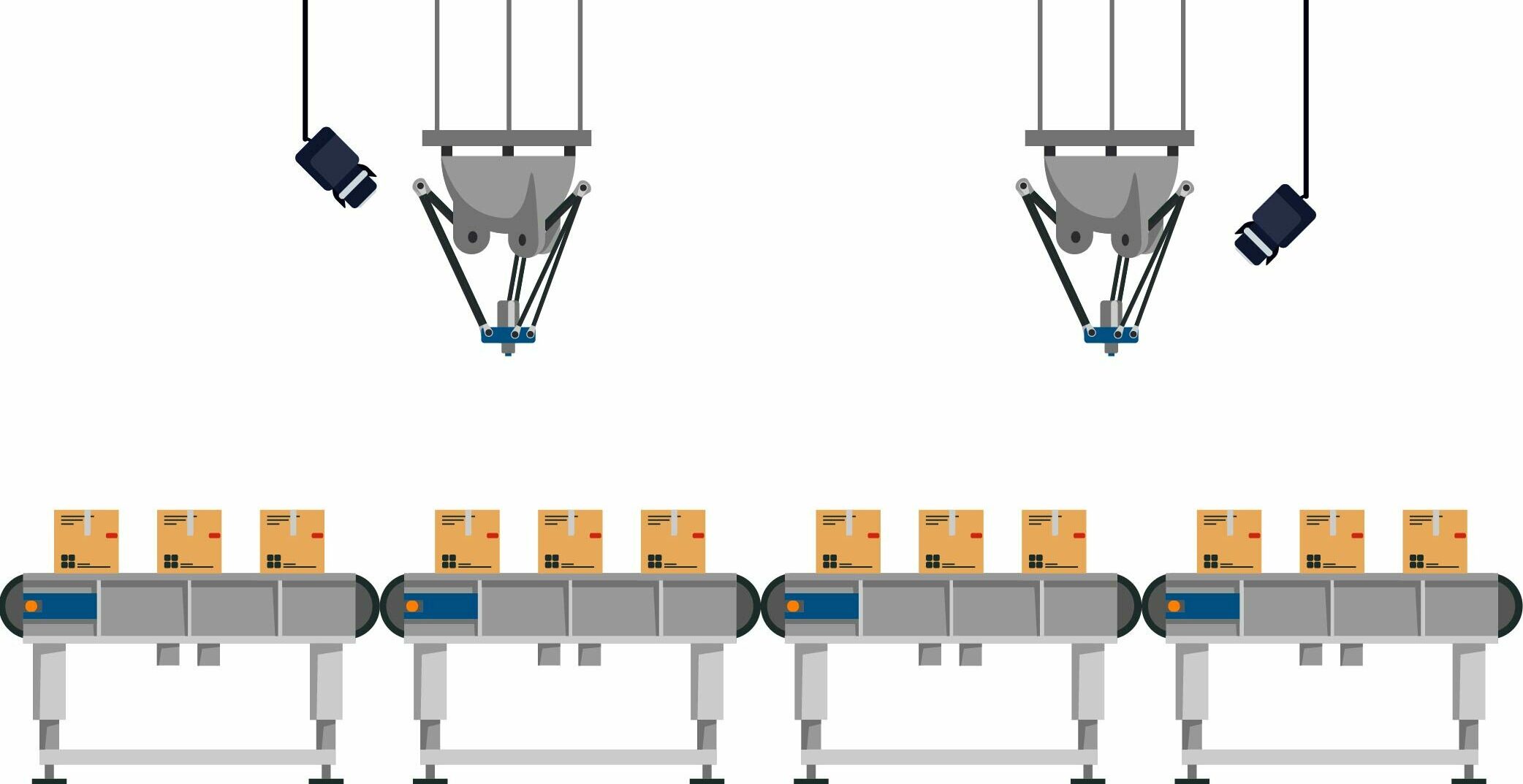
「コンベアトラッキング」とはコンベアの移動距離、速度を知るためのセンサを取り付け、コンベアの速度と同じ速度でロボットを動作させ、コンベア上の製品を取得するなどの動作をさせることです。
コンベアトラッキングにはガイドで製品の動く横方向を制限する場合(コンベアトラッキング、またはセンサトラッキング)と製品の位置を制限せず、上からビジョンカメラで見て位置を把握する場合(ビジョントラッキング)があります。
![]()
「ビジョントラッキング」とはコンベアトラッキングに画像を認識するカメラ(視覚センサ)を使用し、特定の製品の位置や向きを認識させ、その情報とエンコーダの情報からロボットが追従し、製品を取得する技術です。
ビジョンセンサには取得するワークの形状と取得する位置をあらかじめ記憶させます。
キャリブレーション(Calibration)は、日本語に訳すと「較正(校正)」になります。
ロボットシステムにコンベアを取り付け、トラッキング機能を実現するには、コンベア上のワークの位置がロボットにとってどの位置にあるかを計算する必要があります。
コンベアが動作すると、コンベアに取り付けられたエンコーダからパルス信号が出力され、その信号をロボットが受け取り、自分の座標系に補正を行い、その位置に移動します。
産業用ロボットは、時間の経過とともにプログラムの座標位置からずれが発生するので、そのずれを調整する作業を「キャリブレーション」と呼びます。
コンベアトラッキングを利用すると下記のようなメリットがあります。
①コンベアを止める、動かすといった時間が必要なく、装置の作業時間が短くなる。
②位置決め治具が必要なくなり、装置を簡素化でき、多品種生産がしやすくなる。
③品種切替の際、ガイド部分のみで済み、容易に段取り替えができる。

ビジョントラッキングの際にワークを認識し、どのようにロボットを把持するか決める必要があります。
オフラインティーチング(ロボットシュミレーション)とは、ロボットシステム実機を設置する前に、あらかじめどの様な問題が起こるかコンピュータ上で確認することを言います。
ロボットメーカー独自のソフトウェアは以下のようなものがあります。
・FANUC ROBOGUIDE
・安川電機 MOTOSIM
・川崎重工業 K-ROSET
・三菱電機 MELFA Works

オフラインティーチング(ロボット3Dシュミレーション)の依頼を受け付けております。
プログラムや設定をシュミレーターで、MIRAI-LABが作成し、社内でそのデータをベースにティーチング修正を行い、不足している信号系を追加します。
お気軽にお問合せ下さい。
