ロボットが対象製品を移動する際に、マニピュレーターの先端に取り付けられるのがハンドです。扱う対象物がどのようなものであるかによって使用すべきハンドの形状は異なります。
どの様な場合にハンドを用いるべきか理解することが必要です。
ロボットハンドとは
ロボットシステムにおいて、ロボットマニピュレータ先端に取り付け対象製品を移載するものを
ハンドまたは
エンドエフェクタといいます。
指または爪でクランプしたりチャックして掴むものや、へら状のもので対象製品をすくったり、真空吸着や磁石で対象製品を吸着するものがあります。
ハンドは対象物の質量、形状、硬度、材質などにより通常専用設計されます。
指や爪の駆動源としては電動、圧縮エアー、真空エアー、油圧、ロボット動作を応用した機械的駆動などがあります。
何ができるか
ものを掴んで対象物の移載、回転、傾け、破壊(握りつぶし)ができます。
駆動方法によって、軟らかいものには優しく掴むこともできます。
また、掴んでいるものがズレてはいけないものには油圧や機械の倍力機構などを応用して強く掴むことや変形、破壊(握りつぶし)することもできます。
種類
ロボットハンドには一般的に以下の様なものがあります。
把持ハンド
指や爪をエアーシリンダや電動モータの駆動を用いて物体を挟んで掴むハンドをいいます。
DOBOTで食品の搬送もできます。ニッタのハンド「ソフマティックス」
柔らかな食品用の把持ハンド等用途別に様々なタイプのものが存在します。
● 2本指掴み
2本の爪や指を平行又は回転させて物体を掴む。
● 3本指掴み
3本の爪や指を120度間隔で配置し物体を掴む。2本指に比べ、物体を掴む際に安定するが、駆動機構が複雑になるためコストアップになる。
● 複数指掴み
比較的大きい物体を掴んだり抱えたりする場合4本以上の爪や指を設置する。
電動グリッパ―
駆動に電気を使用した把持ハンドは電動グリッパ―とも呼ばれています。弊社では協働用ロボットに装着できる電動グリッパ―の販売を行っています。
DHロボティクス製の電動グリッパ―の紹介記事はこちらからご確認ください。↓
DHロボティクスの協働ロボット用グリッパーをご紹介

すくいハンド

ショベルによるすくい上げです。
物体が軟らかい場合や、崩れ易く脆く掴めない場合、または傷つき易い様な場合、物体下に板状の爪を差し入れすくい上げます。
すくい上げた後、ハンド上で物体の位置がズレない工夫が必要です。
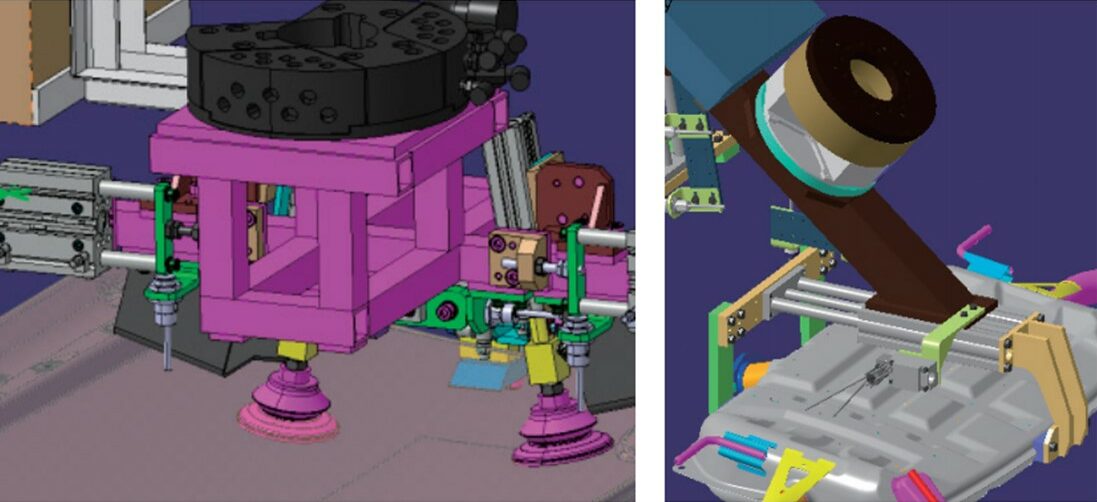
吸着ハンド

● 真空エアーによる吸着
真空発生器による真空エアーを真空パッドにより吸着させて物体を運ひます。物体に穴が開いていなければ(真空エアーが抜けなければ)何でも吸着できます。

そのため吸着ハンドはしばしばパレタイズ作業や食品の搬送等に活用されます。MIRAI-LABのロボット自動化でも多数使用実績があるハンドです。

● 磁力による吸着
主に電磁石による電流の入切で物体を吸着させます。
鉄やニッケルコバルトは吸着できるがアルミや銅は吸着できません。
またステンレスはオーステナイト系は吸着できずフェライト系やマルテンサイト系は吸着できるので注意が必要です。
磁石は平面に直角に確実に吸着しないと吸着力が著しく下がるので注意が必要です。
選定
設計にあたって以下のことを考慮する必要があります。
● 対象物の質量
質量の大小や重心位置も合わせて考慮する必要がある。
● 対象物の形状
形状のうねりや曲面や凸凹の複雑さ。
● 対象物の形状種類
形状が多種になると、困難になる。
● 対象物の柔軟性
● 環境異物
● 搬送スピード
● ロボット許容能力

注意点
次のような注意点があります。
● ハンドの把持力による対象物のダメージ
● 把持対象物の質量に対するハンド・エンドエフェクタ把持面積が少ない事によるダメージ
● ハンド・エンドエフェクタの質量イナーシャによるロボット許容を超えた過負荷
● 吸着ハンドパッド部のゴムへの異物化見込みによる対象物へのダメージ
応用

その物体しか把持できないものを専用ハンドといい、色々な物体を把持できるものを汎用ハンドといいます。
汎用ハンドは非常に技術力が必要で物体の特徴が揃わないと達成できません。
ロボットを活用する際、物体其々に専用ハンドを作った場合、ハンドの持ち替えをすることでできる作業が増えます。この持ち替え作業のことを、ツールチェンジといいます。
ツールチェンジをする際には一般的に
オートツールチェンジ(略称ATC)を用います。
ツールチェンジすることでロボットのできる作業は大幅に増えますが、持ち替える都度時間が必要となります。
ツールチェンジャーはユ ニット化し専門メーカが販売しており、ロボットの可搬に応じた種類が存在します。
ツールチェンジャーの機能として、ハンドの脱着機能の他にエアーや制御線を接続する機能があります。また、メーカによりオプション機能として動力電源や溶接電源、冷却水、油圧を接続できる機能を追加できるようになっています。
お問い合わせ