自動化のために導入する産業用ロボットは決められた単純作業を繰り返し行うのが得意です。ただ、更なる作業の自動化と効率化を進めるためには、ロボット自体が判断できるために視覚や力覚といった自律性向上が必要です。そのなかでセンサーとそのソフトウェアの役割はより重要になっています。
センサは、ロボットやAGV、スマートフォンやドローンなどで重要な役割を担っています。
センサ(senser)は「日本工業規格」「JIS-Z8103-2000」では以下のように定義されています。
測定量によって直接に影響を受ける、計器又は測定装置の連鎖の素子。
備考:検出器と同じ意味に用いることがある。
【参考】JIS 規格
センサが収集し、置き換える信号(物理量)には、温度、光、色、圧力、磁気、速度、加速度 などさまざまなものがあります。これらは、半導体の物質変化を利用するものですが、そのほかにも、酵素や微生物などの生体物質を用いるバイオセンサなどもあります。
私たちの日常生活の至るところでセンサは活躍しています。

例えば、部屋の中にあるエアコンには温度や湿度を計測する温度・湿度センサーが搭載されています。スマートフォンでは、現在地を確認するGPSや傾きや動きを検知する加速度センサや、距離を測る距離センサやカメラなどが搭載されています。玄関のインターフォンにはイメージセンサや音センサ、夜に自動点灯する外灯は光センサで検知しています。
次にロボット関連のセンサの種類について紹介していきます。
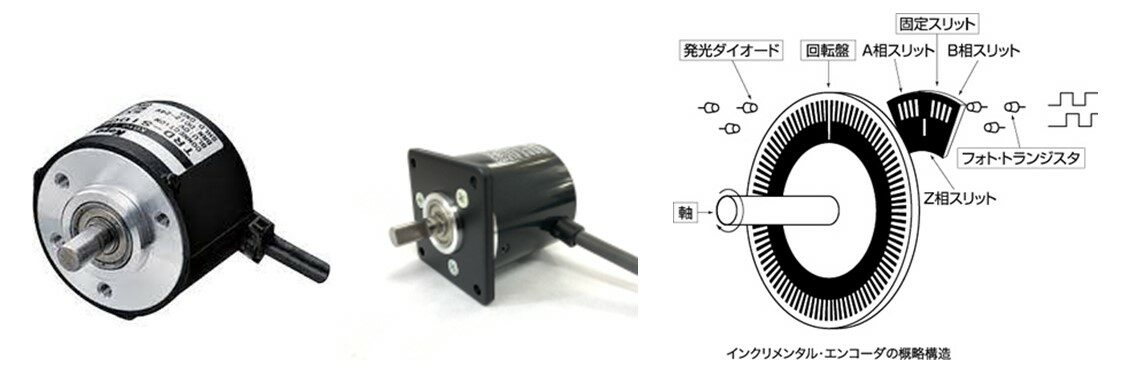
回転角や直性変位を符号化(encode)するセンサです。回転を検出するものはロータリーエンコーダ、直線の変位を検出するものはリニアエンコーダと呼ばれます。
ロータリーエンコーダは、等間隔のスリットが開けられた円板が入っており、円板の片方で光を発し、もう一方で通過する光の点滅を検出し、測定することにより軸の回転角度や回転数、回転速度を測定しています。サーボモータなどに多く使われています。
温度センサは、温度を計測するためのセンサで、湿度センサは雰囲気中の水分割合を検出するセンサです。
安全の枠内で稼動していることを保証するために、多くのロボットで、周囲の環境ならびにモーターやメインのAIマザーボードなどのロボット部品の温度と、場合によっては湿度の測定が必要です。これはロボットにとって特に重要です。なぜなら、モーターに重い負荷がかかっている状態だと、電力を多く消費し、熱を持つ可能性があるからです。
赤道付近にある工場や熱帯気候の地域では、電子システムの保護と予知保全のために温度センサと湿度センサを使って露点温度を予測できます。

こちらは三次元位置(縦、横、高さおよび傾き)を計測することでバラ積みピッキングなど、乱雑に積まれたワークを上から順にアームで取り出すことができます。従来行っていたように動作に対してスクリプト(コード)を書き込んでいくという作業ではなく、山積みになった部品を撮影して3D CADとマッチングさせることで自動的に動作が生成されるため、作業員による準備は非常に簡単で短時間となります。
関連記事:コンベアトラッキング、ビジョントラッキングとは?
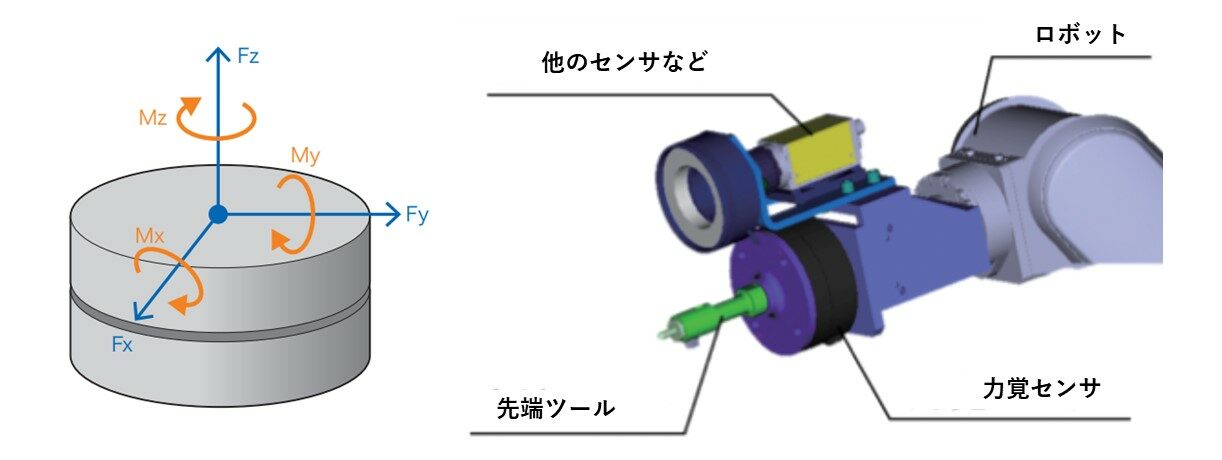
関連記事:ロボットに人のような感覚を【力覚センサの活用】

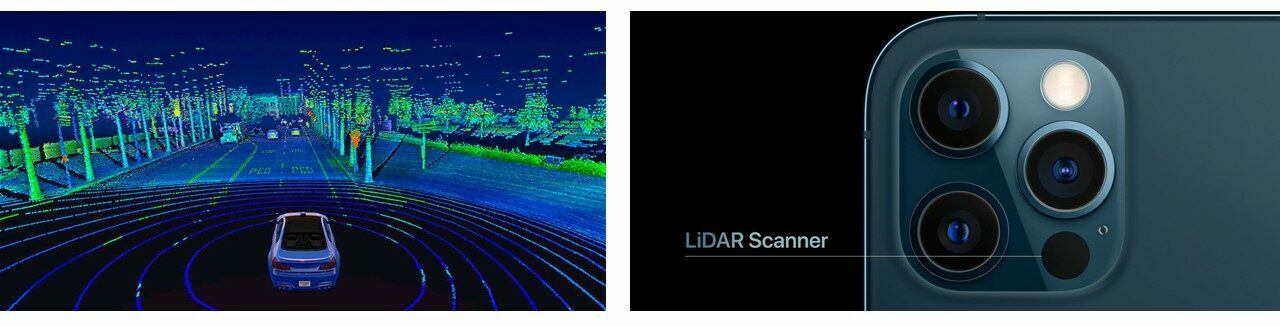
発信から受信までの「時間」を計測することで対象物までの距離を検知するセンサです。
距離の測定手法としてよく使われるTOF(Time of flight)は、飛行時間という意味で、発したものが対象物に反射して返ってくるまでの時間を計測する手法。代表的なものは、光と超音波です。センサヘッドから超音波を発信し、対象物から反射してくる超音波を再度センサヘッドで受信する。
産業用ロボットの市場の拡大や工場の自動化、AI・IoT分野の進化などの傾向を踏まえると、それに伴ってロボットセンサの需要も伸びると予想できます。
具体的な理由は次のとおりです。
さらに今後は、さまざまなセンサの性能を融合したマルチセンサの開発や、センサの省力化・小型化などが課題になるはずです。